Abstract:
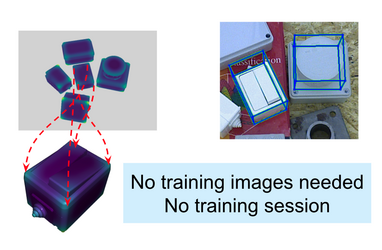
Six degree-of-freedom pose estimation of a known object in a single image is a long-standing computer vision objective. It is classically posed as a correspondence problem between a known geometric model, such as a CAD model, and image locations. If a CAD model is not available, it is possible to use multi-view visual reconstruction methods to create a geometric model, and use this in the same manner. Instead, we propose a learning-based method whose input is a collection of images of a target object, and whose output is the pose of the object in a novel view. At inference time, our method maps from the RoI features of the input image to a dense collection of object-centric 3D coordinates, one per pixel. This dense 2D-3D mapping is then used to determine 6dof pose using standard PnP plus RANSAC. The model that maps 2D to object 3D coordinates is established at training time by automatically discovering and matching image landmarks that are consistent across multiple views. We show that this method eliminates the requirement for a 3D CAD model (needed by classical geometry-based methods and state-of-the-art learning-based methods alike) but still achieves performance on a par with the prior art.